西门子CPU222CN模块代理商西门子CPU222CN模块代理商
用户:Smart200的PID向导很好用,但是不方便修改增益、积分、微分啊?
工程师:方便的,请问您在哪修改的啊?
用户:每次修改都得重新下程序,太麻烦了,如下:

工程师:使用PID向导,进行功能编程。对应参数是有地址的,直接修改参数值,在PID新的采样周期立即生效的。可能您没找对地方,请参见PIDx_SYM。
请注意只有回路增益、积分时间、微分时间是可以修改的,其他参数可以当作只读参数。如用户希望能够在触摸屏上显示百分比的参数时,会用到标准化过程值和标准化回路输出等。
这部分介绍,西门子的技术文档A0136和A0666里介绍很详细,请参见。
用户:那我也想通过触摸屏实现PID自整定功能,行吗?
工程师:可以,您注意过在PID向导配置完成后占用的V区地址了吗?这里有相应的自整定使能位和自整定完成状态位。

这部分介绍可以参见系统手册PID回路和整定章节,具体表格如下:
红色:PID自整定使能位、进行位、完成位
蓝色:PID自整定结束后的建议参数(含增益、积分、微分)
黄色:PID运行时的增益积分微分,注意采样时间仅在组态界面设置,不可随意修改。

接下来,看AT控制字和状态字,如下图:
红色:Vx.7=1启动PID自整定;Vx.7=0停止PID自整定
黄色:Vv.0=1自整定正在进行;Vv.0=0自整定没有进行
蓝色:Vm.7=1自整定完成;Vm.7=0自整定未完成
绿色:自整定结果代码,方便错误查询

用户:谢谢哈,讲解很详细,但是这些状态位地址能否更简单的获得,通过偏移量预算容易出错的
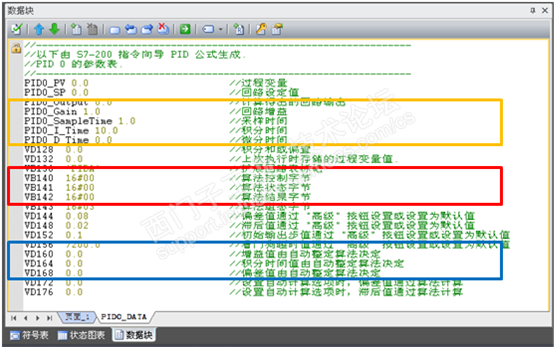
工程师:可以打开数据块PIDx_DATA中,看存储器的中文注释,如下图:
红色:PID自整定使能位--控制字节位;自整定完成位--结果字结位
蓝色:PID自整定结束后的建议参数(含增益、积分、微分),此处VD168注释标识错误,应为微分时间由自整定算法决定
黄色:PID运行时的增益、积分、微分
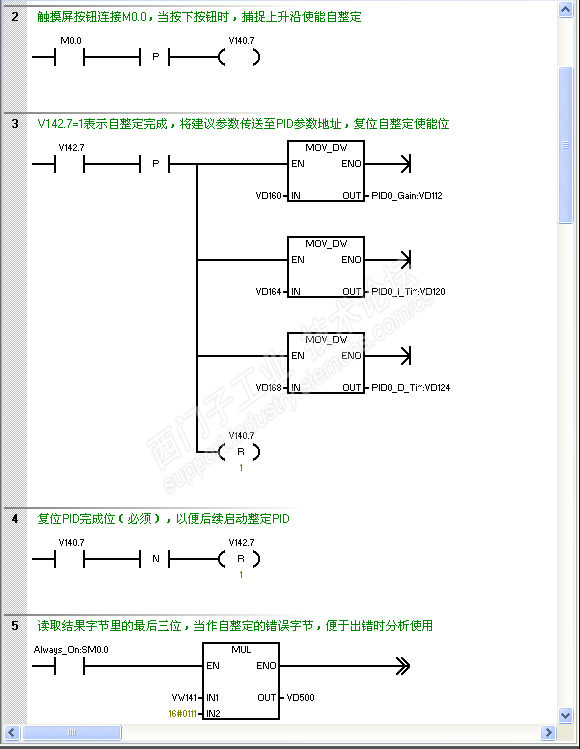
描述:只有Vm.7=0时才能启动自整定功能,当用Vx.7=1启动自整定后,Vm.7=1表示自整定完成,期间可以使用Vx.7=0中止自整定过程。
如果用触摸屏按键连接变量置位Vx.7。通过程序中判定当Vm.7=1时表示PID整定已完成,将整定建议的参数传送(move)到PID运行参数里,再复位Vm.7=0和Vx.7=0。
期间可以读取自整定状态和错误信息,如有错误可依此分析错误原因。思路简略如下: